こんにちは、K10-K10です!
私たちは3月27日から29日にかけて開催されたRoboCup Junior Japan Open 2026 Aichiに参加しました。今回はその結果と、来年の予定について紹介します。
結果
私たちは3位に入賞しました!

さらに、ベストプレゼンテーション賞も受賞しました。
これが大会で使用したプレゼンテーションです: プレゼンテーション (PDF)
ロボット機体とプログラム
関東大会からいくつかの改良を加えました。これが日本大会で使用したロボットです。
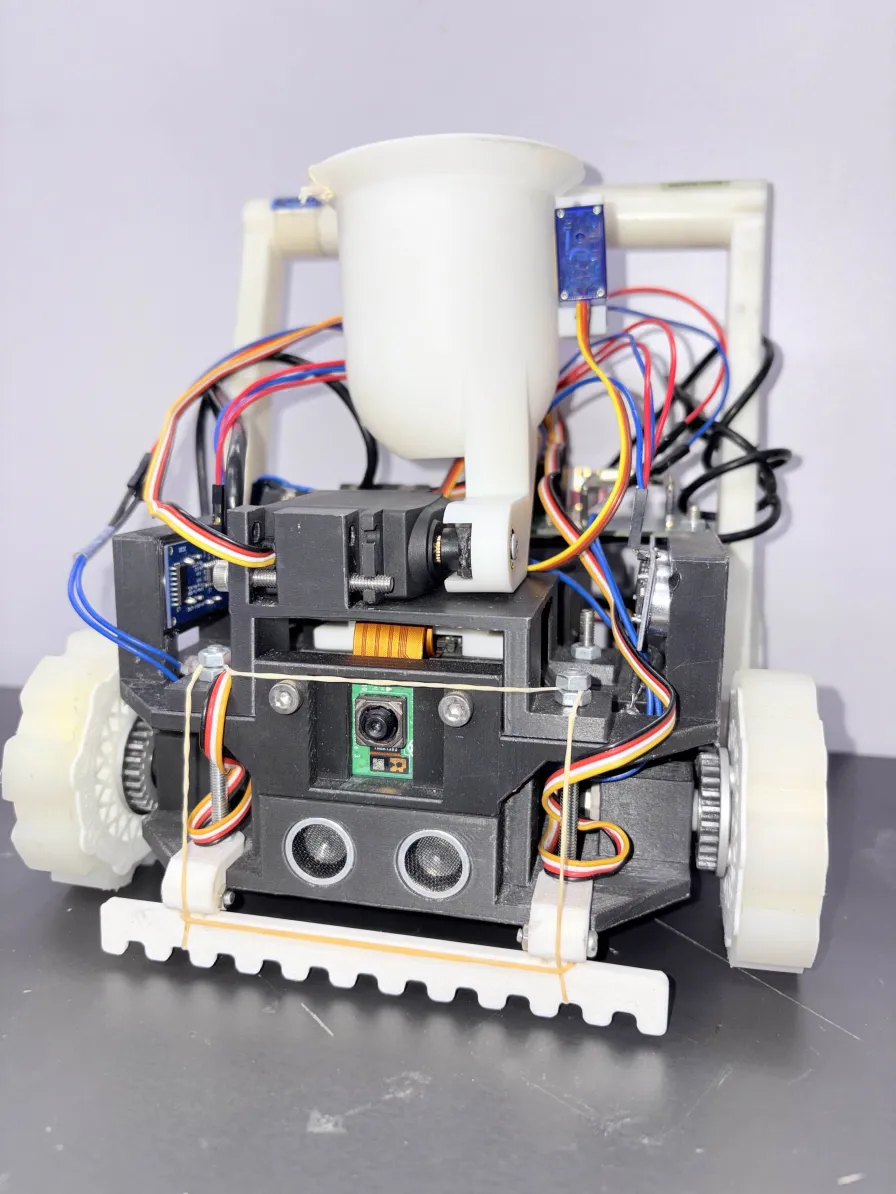
グリップを向上させるためにタイヤをシリコン製に変更し、さらに爪楊枝を避けるための構造を追加しました。
プログラムはGitHubで公開しています:
各走行の結果
決勝では3回走行しました。以下がその結果です。
詳細はこちらをご覧ください。
走行1
- スコア: 273
- タイム: 8分0秒
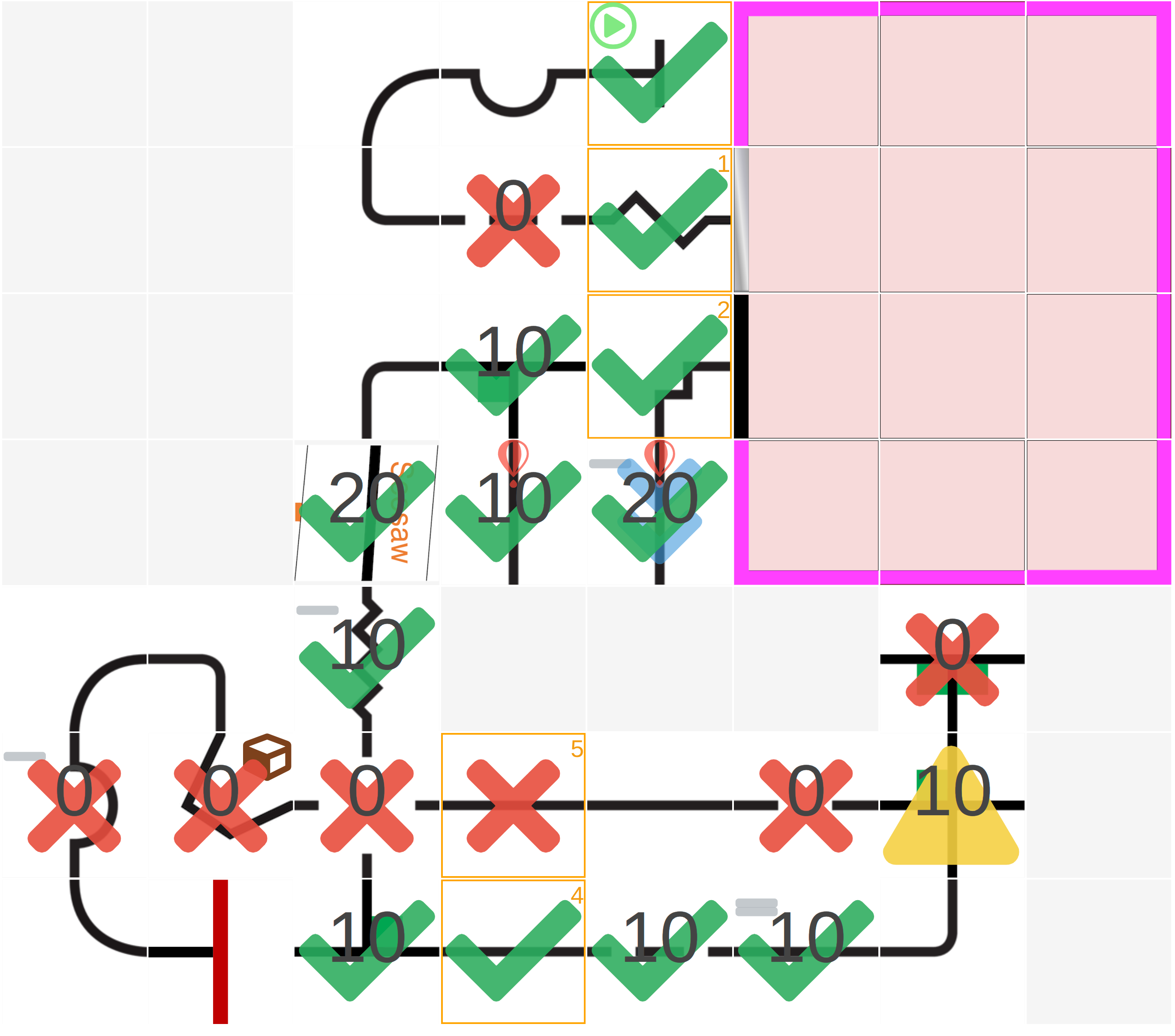
ギャップ処理を追加しましたが、いくつかの問題があり、うまく機能しませんでした。
また、救助ゾーンの手前でロボットがスタックし、最初のチェックポイントに到達するまでに多くの時間を費やしました。
救助ゾーンでは、被災者を2人救助しました。
走行2
- スコア: 469
- タイム: 7分58秒
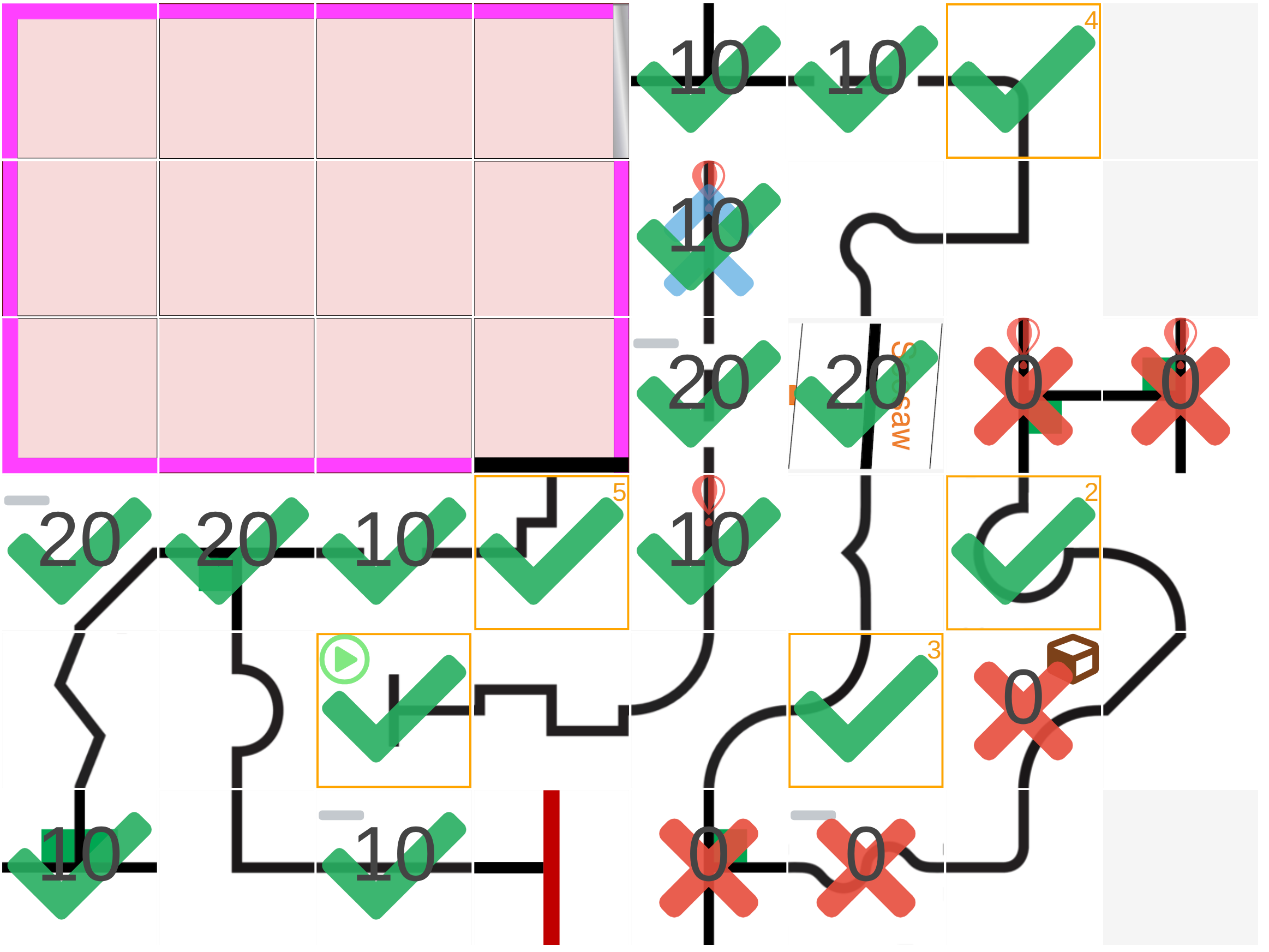
ギャップ処理を削除したことで走行は大きく改善しました。
爪楊枝を避けるための構造も効果的に機能し、完走することができました。
救助ゾーンでは、被災者を2人救助しました。
走行3
- スコア: 595
- タイム: 7分16秒
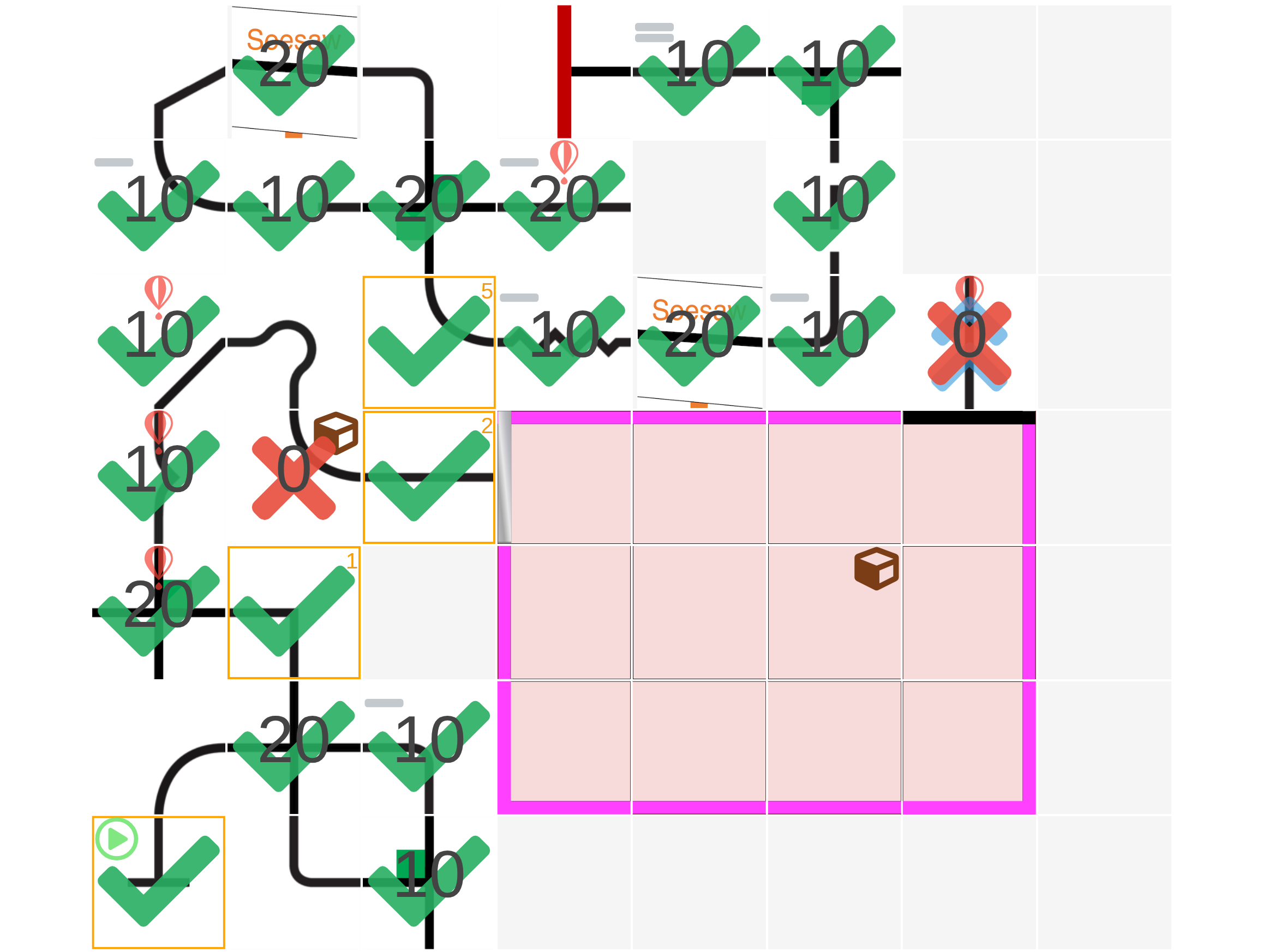
5枚目のタイルが固定されていませんでしたが、それ以外は順調に走行できました。
救助ゾーンでは被災者を2人救助しました。
全体の結果と反省
最初の走行では問題がありましたが、2回目と3回目の走行ではそれらを修正し、パフォーマンスを向上させることができました。
最終的に3位となり悔しい結果ではありましたが、初めての日本大会で多くのことを学ぶことができました。
一方で、まだ多くの課題が残っています。例えば、救助ゾーンから安定して脱出できないことや、ライントレースの安定性が十分でない点などです。
最初の走行がうまくいっていれば、2位になれたかもしれません
来年の予定
来年はチームメンバーにいくつか変更があります。
より安定したロボットの製作を目指し、ライントレースや救助ゾーンでの処理を改善していきます。
また、今年は電子機器の信頼性に課題があり、いくつかのモーターが故障してしまったため、来年はより堅牢な設計に取り組みます。
さらに、システム全体の安定性を高め、パフォーマンスの向上を目指します。
今後もこの大会に参加していく予定ですので、来年もよろしくお願いします!
Thank you for reading!