Hi, I’m K10-K10!
We participated in RoboCupJunior Japan Open 2026 Aichi from 27th to 29th March, and I’d like to share our results and our plans for next year.
Results
We finished in 3rd place.

We also won the “Best Presentation” award!
Here is the presentation we made for the competition (sorry, it’s only available in Japanese): Presentation (PDF)
Robot and Programs
We made several improvements from the Kanto competition, and this is our robot for the Japan competition:
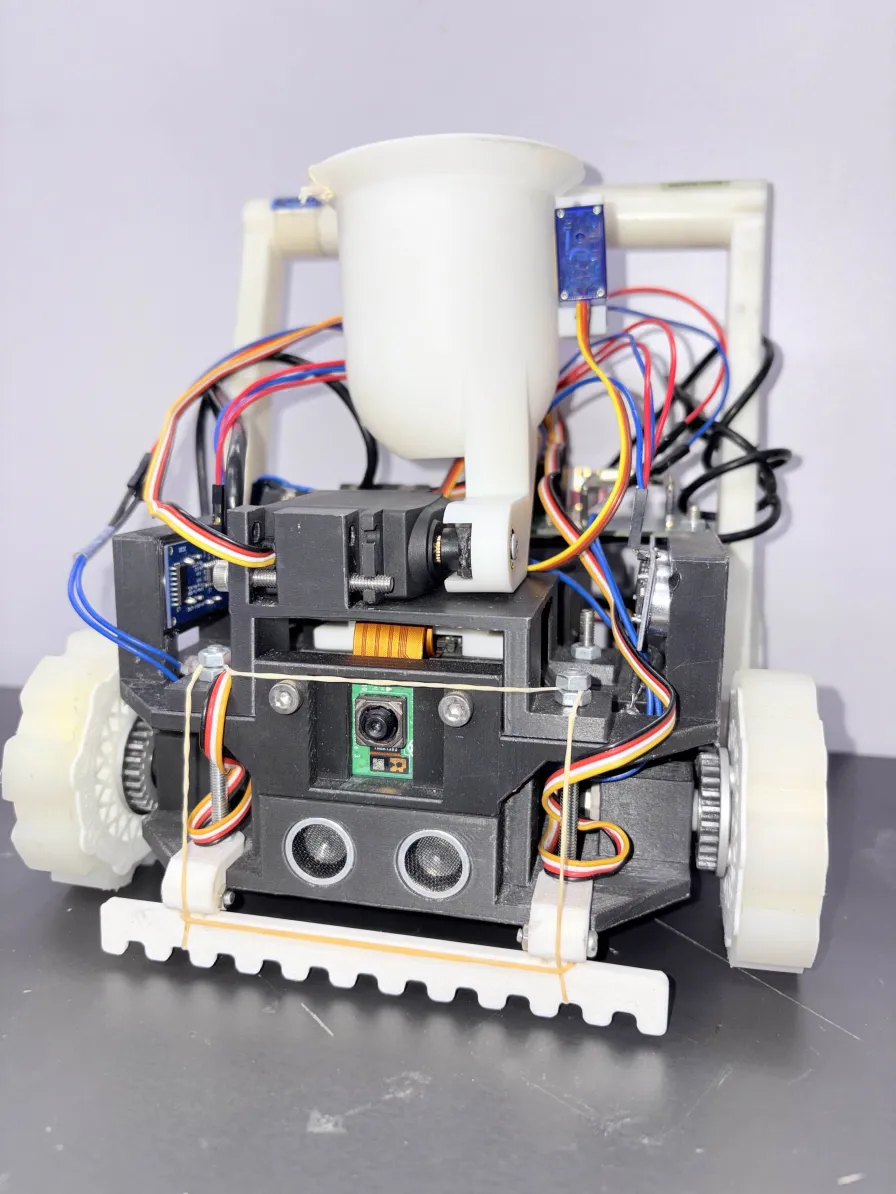
We changed the tyres to silicone ones to improve grip, and we also added a structure to avoid getting stuck on toothpicks.
The programs are available on GitHub:
Results of Each Run
We had 3 runs in the final. Here are the results.
More details are available here.
Run 1
- Score: 273
- Time: 8 min 0 sec
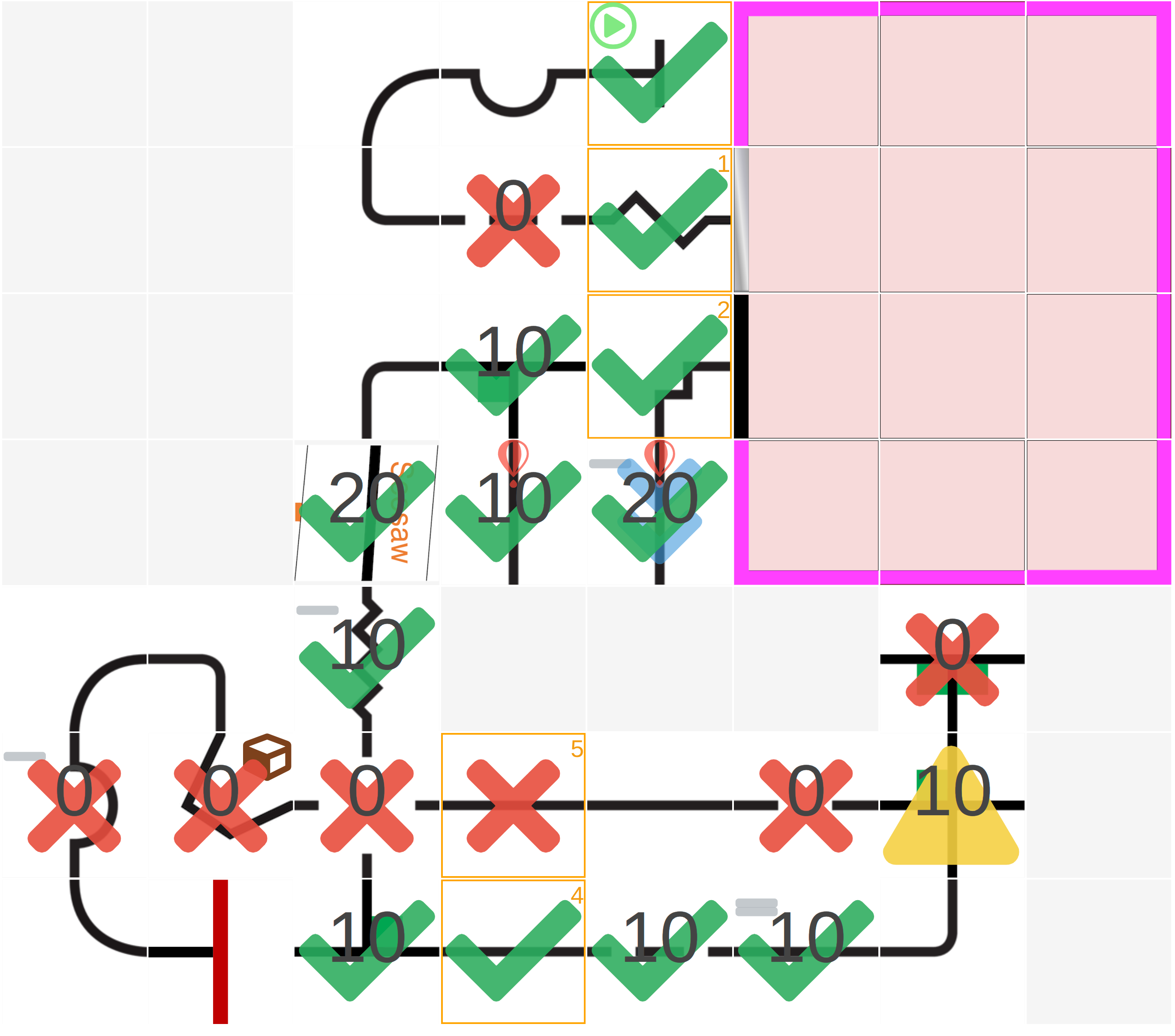
We had added gap handling, but it did not work well due to some issues.
Additionally, the robot got stuck before the rescue zone, so we spent a lot of time reaching the first checkpoint.
In the rescue zone, we rescued 2 silver balls.
Run 2
- Score: 469
- Time: 7 min 58 sec
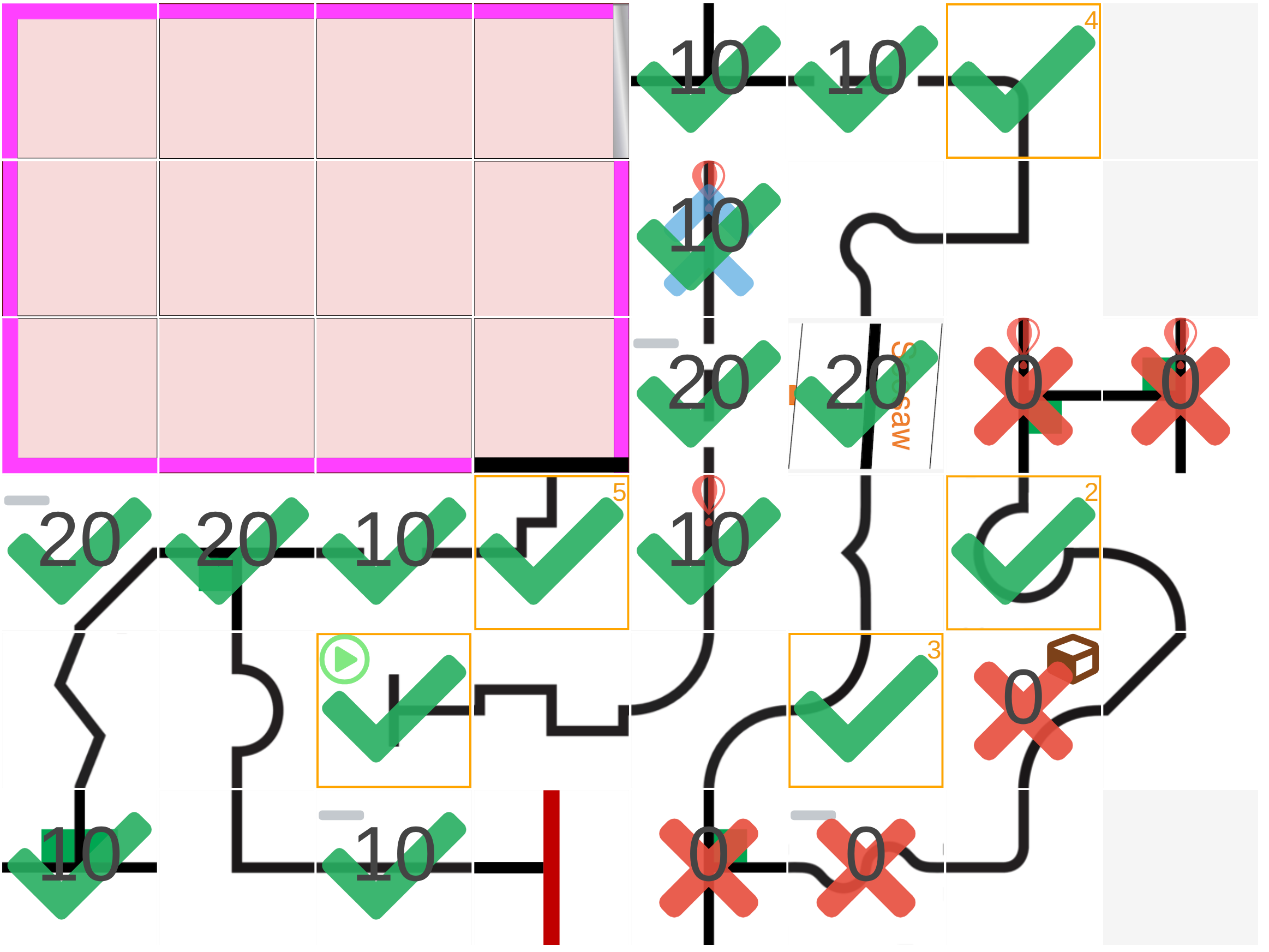
We removed the gap handling, and the run went much better.
The structure to avoid toothpicks also worked well, and we were able to exit successfully.
In the rescue zone, we rescued 2 silver balls.
Run 3
- Score: 595
- Time: 7 min 16 sec
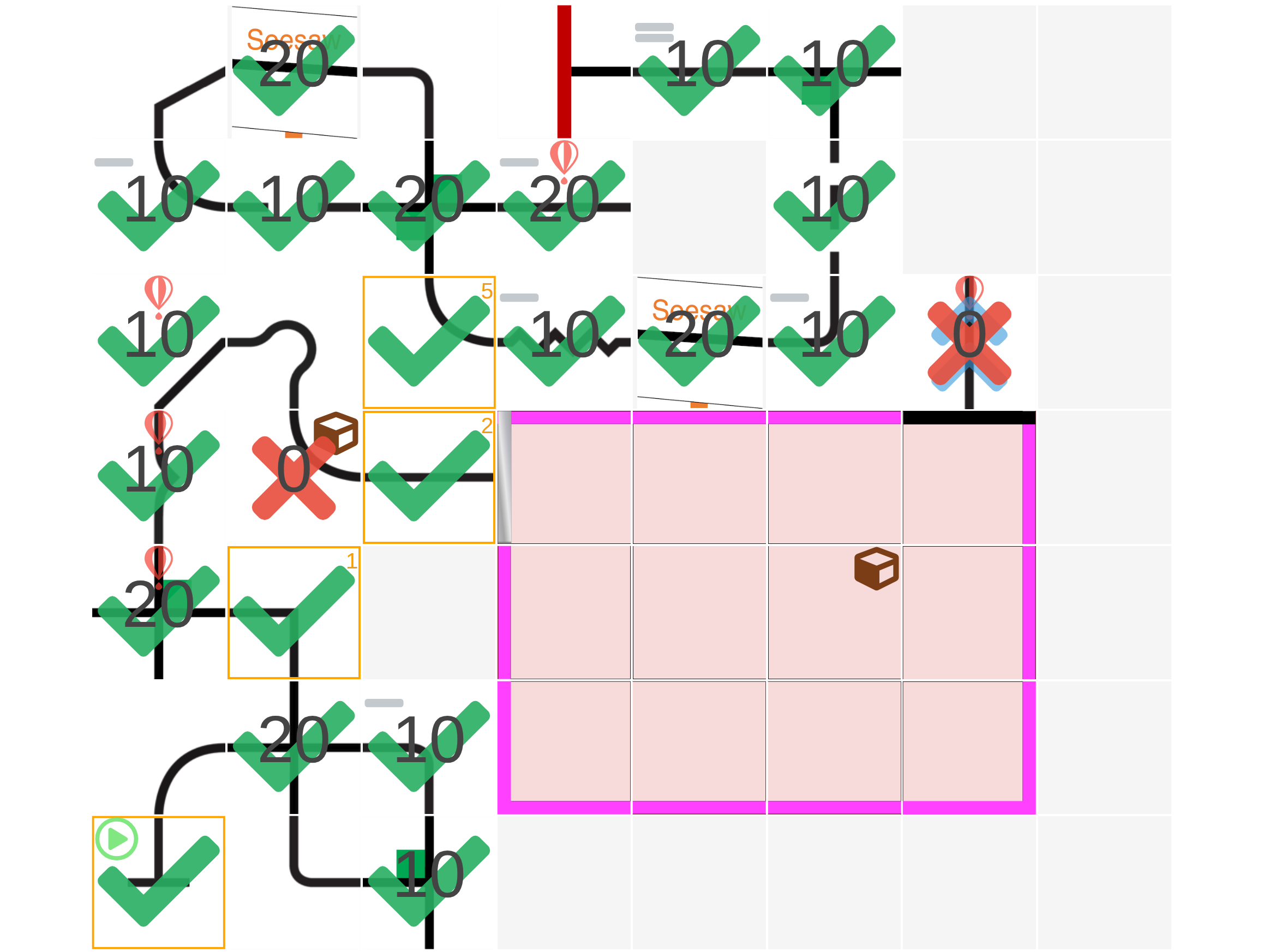
The fifth tile was not secured.
Otherwise, the run went well, and we rescued 2 silver balls in the rescue zone.
Overall Results and Reflection
We had problems in the first run, but we were able to fix them and improve our performance in the second and third runs.
We finished in third place by a narrow margin, which was disappointing for us. However, this was our first time participating in the Japan competition, and we learned a lot from the experience.
We still have many issues to address. For example, we were not able to consistently exit the rescue zone, and our line tracing was not stable enough.
If the first run had gone well, we might have placed second
Next Year’s Plans
We will have some changes in team members next year.
This year, our electronics were not very reliable, and we broke several motors, so we want to build a more robust robot next year.
We also aim to improve our line tracing and rescue zone handling, and develop a more stable system overall.
We plan to continue participating in this competition, and we look forward to next year!
Thank you for reading!